Automatic Tumor Localization for Minimally Invasive Surgery
A surgical system aiming at better therapy for patients and less cognitive load for surgeons (Website).
The hardware setup includes: the da Vinci surgical system, CMU-Boeing Blaser senor (a light-weighted laser scanner), stereo camera(Intel RealSense), forth sensor, motion simulation platform and phantom liver model. 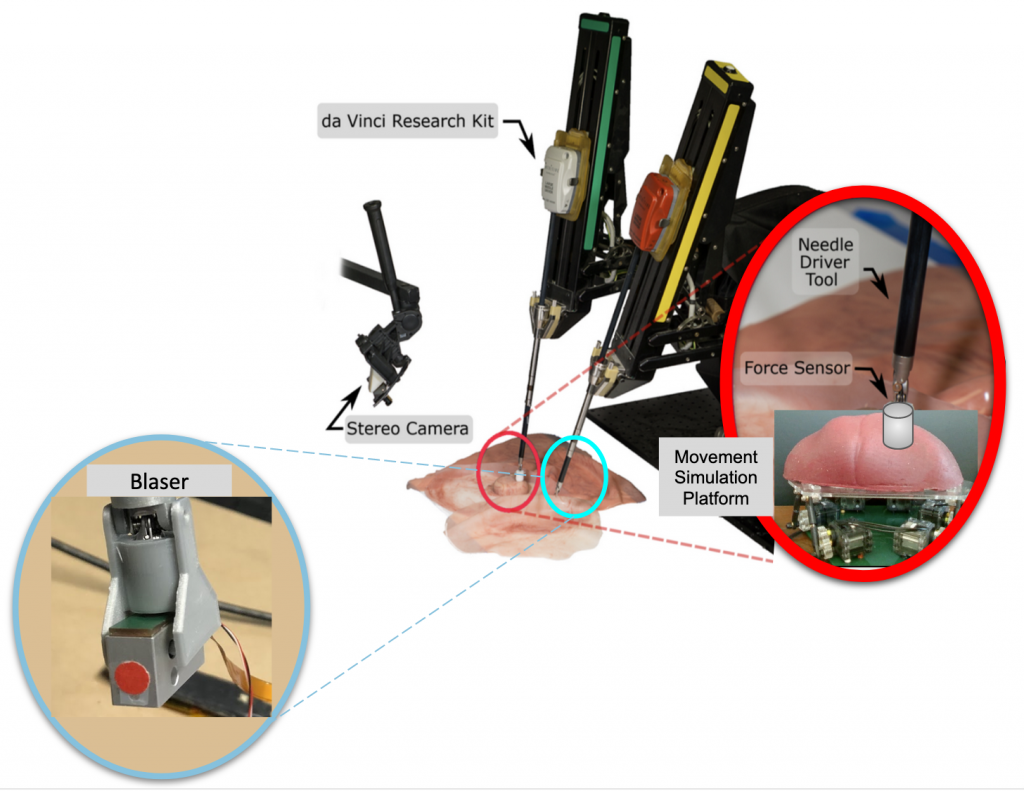
A brief diagram of the system architecture: 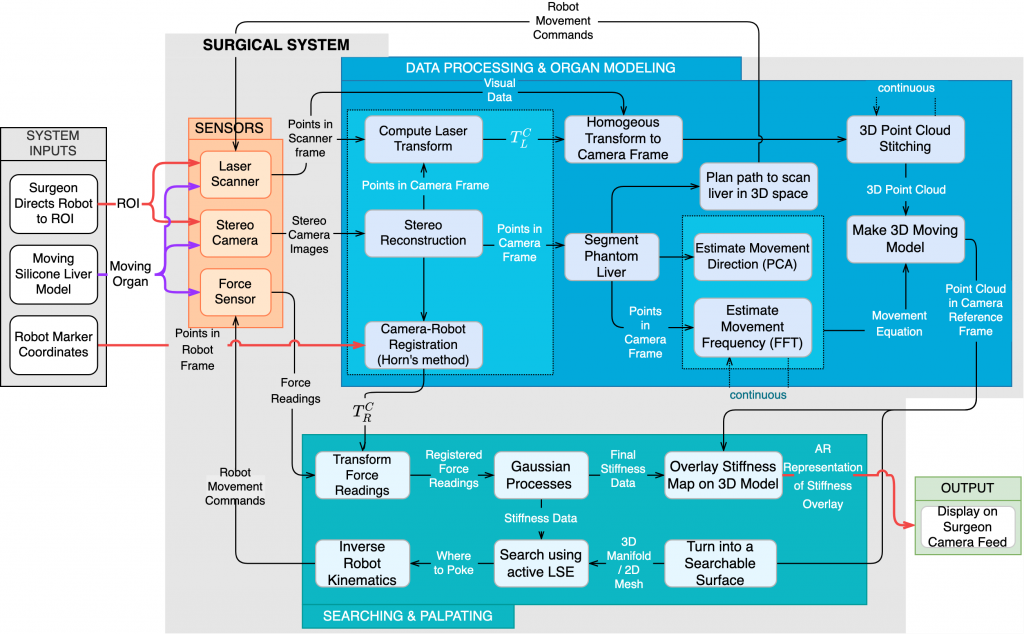
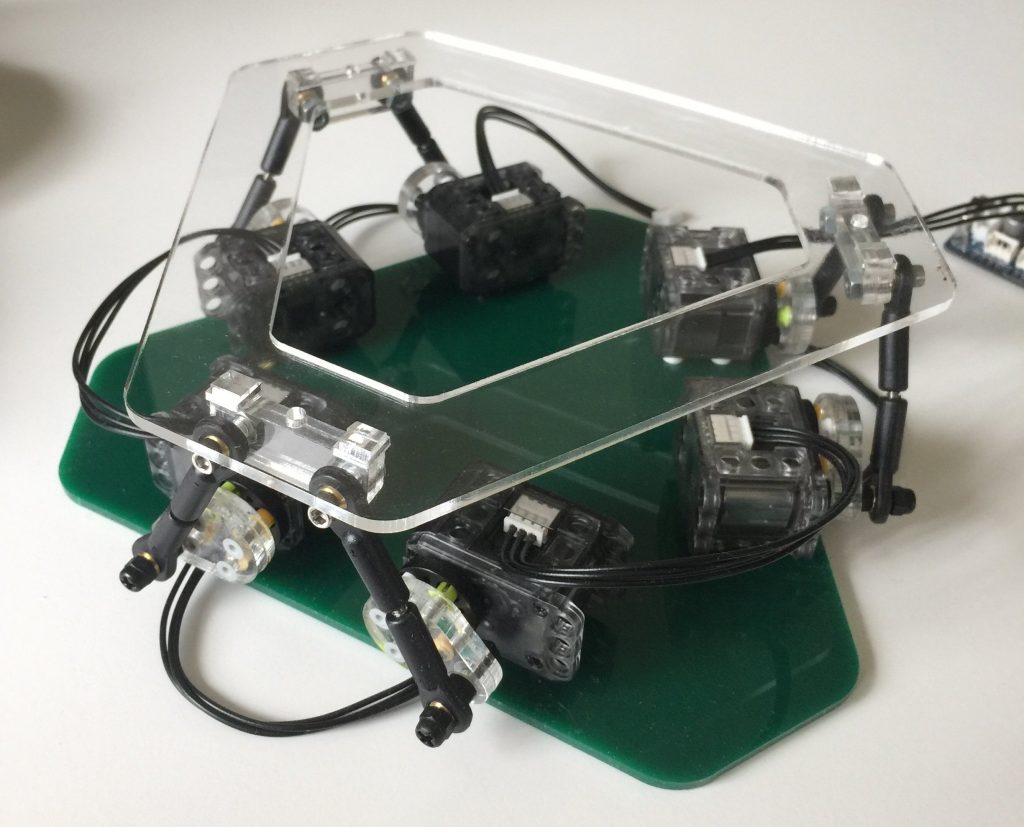
We built a motion simulation platform based on the open-source Stewart platform designed by Professor Ken Goldberg, to mimic the subtle motion or organ during the surgery due to the heartbeat and respiration of the patient.
Demo Video